Monocular Depth Estimation via Deep Structured Models with Ordinal Constraints
- Daniel Ron1,2
- Kun Duan3
- Chongyang Ma3
- Ning Xu3
- Shenlong Wang4
- Sumant Hanumante3
- Dhritiman Sagar3
- 1CMU
- 2Amazon
- 3Snap Inc.
- 4University of Toronto
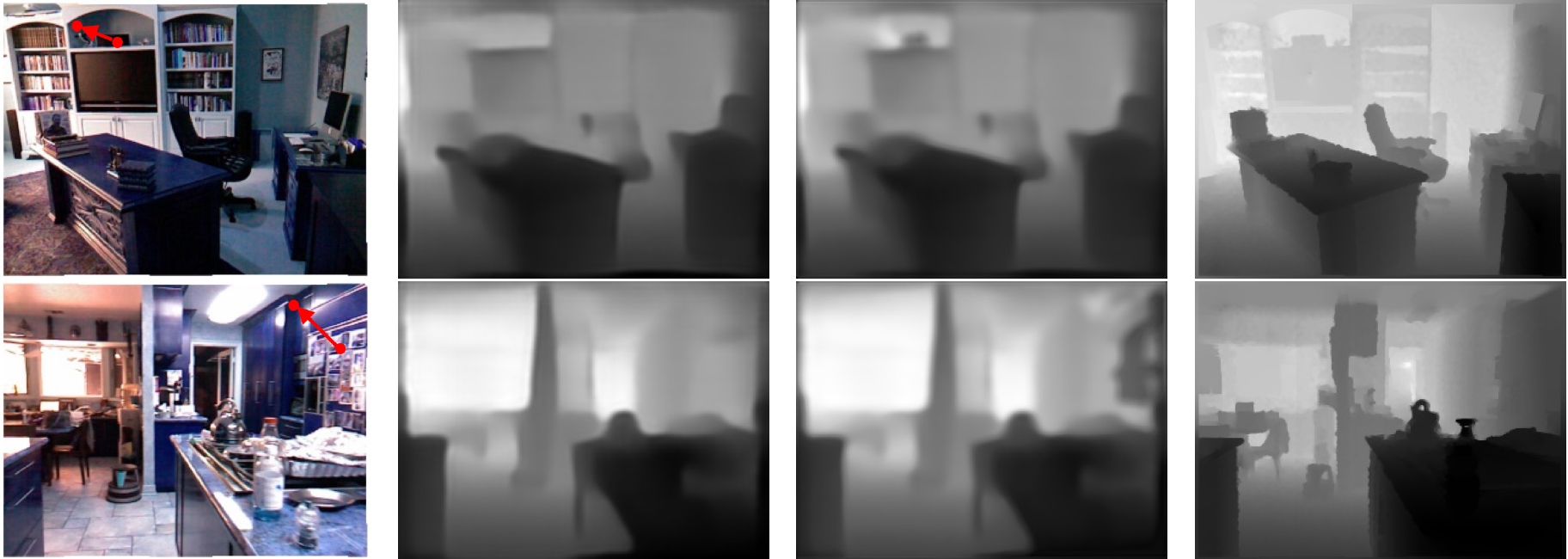
Depth estimation results on NYU Depth V2 dataset. From left to right: input images with ordinal constraints visualized as red arrows pointing from a closer click to another further point; results from the FCRN base network; our refined results; ground-truth.
Abstract
User interaction provides useful information for solving challenging computer vision problems in practice. In this paper, we show that a very limited number of user clicks could greatly boost monocular depth estimation performance and overcome monocular ambiguities. We formulate this task as a deep structured model, in which the structured pixel-wise depth estimation has ordinal constraints introduced by user clicks. We show that the inference of the proposed model could be efficiently solved through a feed-forward network. We demonstrate the effectiveness of the proposed model on NYU Depth V2 and Stanford 2D-3D datasets. On both datasets, we achieve state-of-the-art performance when encoding user interaction into our deep models.
Paper